Virtual VEX Robototexnika platforması ilə proqramlaşdırmanın və robototexnikanın əsasları onlayn kursuna xoş gəlmisiniz !
Kursumuzun məqsədi:
- Virtual Robototexnika platformasından istifadə etməklə robototexnikanın və proqramlaşdırmanın əsaslarını öyrətmək
- Robototexnikanı hər bir kəs üçün əlçatan etmək
Kurs 8 dərs və hər bir dərsə uyğun tapşırıqlardan ibarətdir. Videoları diqqətlə izləyib, tapşırıqları yerinə yetirməyiniz tövsiyyə olunur. Sonda sertifikat qazanmaq üçün imtahanda 20 sualdan ən azı 17 -sinə düzgün cavab verməlisiniz.
Kursu tamamlayan zaman qarşılaşdığınız sual və çətinliklər barəsində sosial mediada suallarınızı ünvanlaya bilərsiz. Öncədən hər birinizə uğurlar arzulayırıq!
Dərs 1| VEX Virtual Robototexnika platforması ilə tanışlıq
VR Vex platforması şagirdlərə robototexnikanın və proqramlaşdırmanın əsaslarını öyrətmək üçün hazırlanmış virtual robototexnika platformasıdır. Platformaya daxil olmaq üçün vr.vex.com saytından istifadə edə bilərsiz. Platformaya daxil olduqdan sonra fərqli Playgroundlardan istifadə etməklə fərqli misiyaları tamamlaya bilərsiz. Platformada hesab açmağınıza ehtiyac yoxdur. Platforma sürüklə burax tipli proqramlaşdırma mühiti təqdim edir. Eyni zamanda robotu Python proqramlaşdırma dilində də proqramlaşdıra bilərsiz. Hazır nümunələri nəzərdən keçirmək üçün File -open examples əmrini seçin. Hazırladığınız proqramları isə File- Save to your device əmrlərindən istifadə etməklə kompüterinizdə yaddaşda saxlaya bilərsiz. Yaddaşda saxlanmış bloklar da File- Load from your device komandası ilə platformaya yüklənir. Platforma ilə daha yaxından tanış olmaq üçün ilk video dərsimizi izləməyi və təqdim olunan tapşırıqları yerinə yetirməyinizi tövsiyyə edirik.
Bu dərsdə öyrənəcəksiz:
- Kursun məqsədi nədir?
- Platformaya necə daxil olmalı?
- Playground seçimi
- Kod menyusu
- Fayl menyusu
- Sensorlar paneli
Dərs 2| Vex Virtual robotunun quruluşu
Vex Virtual robotu real həyata istifadə etdiyimiz robototexnika qurğularının bir çox xüsusiyyətini ö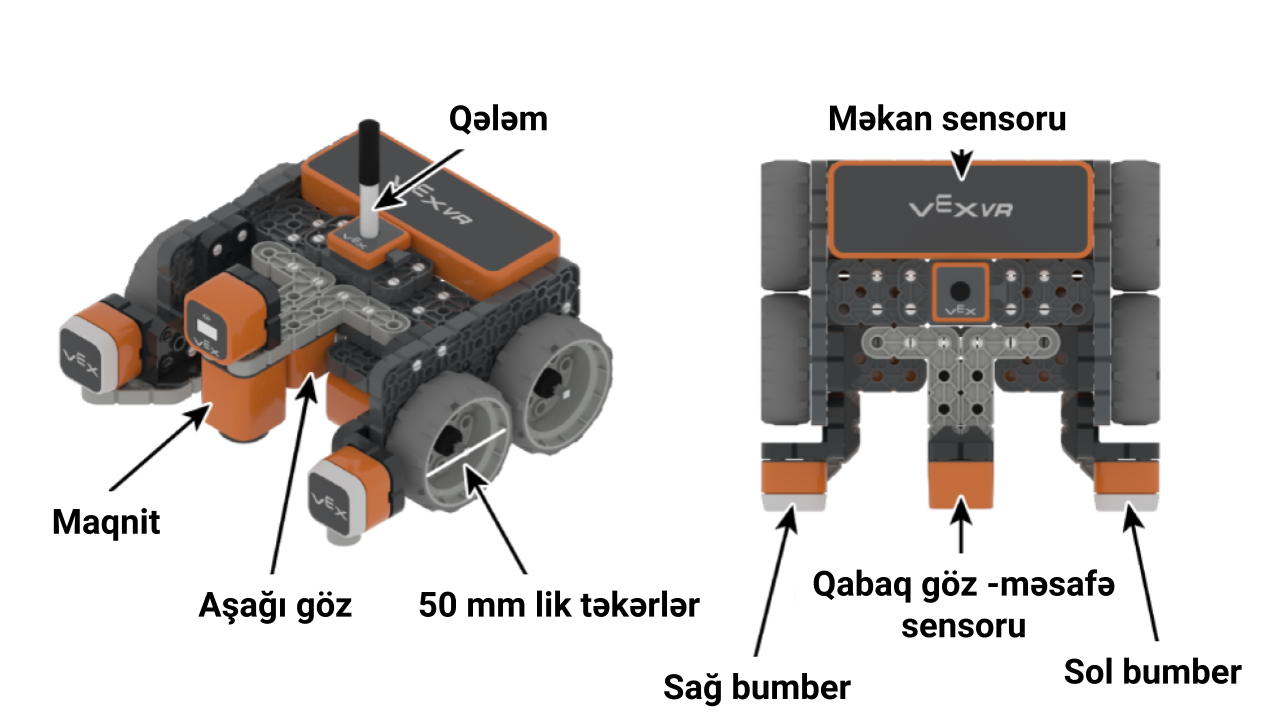 zündə saxlayır. Robotun qabaq hissəsində sağ və sol bumberləri görə bilərsiz. Bu robotun hansısa bir obyektə toxunub toxunmamasını müəyyən etmək üçündür. Eyni zamanda qabaq tərəfdə rəng sensoru kimi iki ədəd kamera var. Bunlardan biri üzü aşağı digəri isə üzü robotun ön tərəfinə doğru istiqamətlənib. Robotun sağ və sol tərəflərində yerləşdirilmiş 2 ədəd təkəri var bu təkərlərin diametri 50 mm dir. Qarşı ön tərəfdə yerləşən digər bir element isə elektronik maqnitdir. Maqnit robota əşyaları götürməyə imkan verəcək. Robotun düz mərkəzində qələmi yerləşir. Daha ətraflı məlumat almaq üçün növbəti videomuzu izləyin:
zündə saxlayır. Robotun qabaq hissəsində sağ və sol bumberləri görə bilərsiz. Bu robotun hansısa bir obyektə toxunub toxunmamasını müəyyən etmək üçündür. Eyni zamanda qabaq tərəfdə rəng sensoru kimi iki ədəd kamera var. Bunlardan biri üzü aşağı digəri isə üzü robotun ön tərəfinə doğru istiqamətlənib. Robotun sağ və sol tərəflərində yerləşdirilmiş 2 ədəd təkəri var bu təkərlərin diametri 50 mm dir. Qarşı ön tərəfdə yerləşən digər bir element isə elektronik maqnitdir. Maqnit robota əşyaları götürməyə imkan verəcək. Robotun düz mərkəzində qələmi yerləşir. Daha ətraflı məlumat almaq üçün növbəti videomuzu izləyin:
Bu dərsdə öyrənəcəksiz:
- VEX VR robotunun quruluşu
- Sensorların ümumi təyinatı haqqında məlumat
Dərs 3| VEX Virtual robotu hərəkətə başlayır
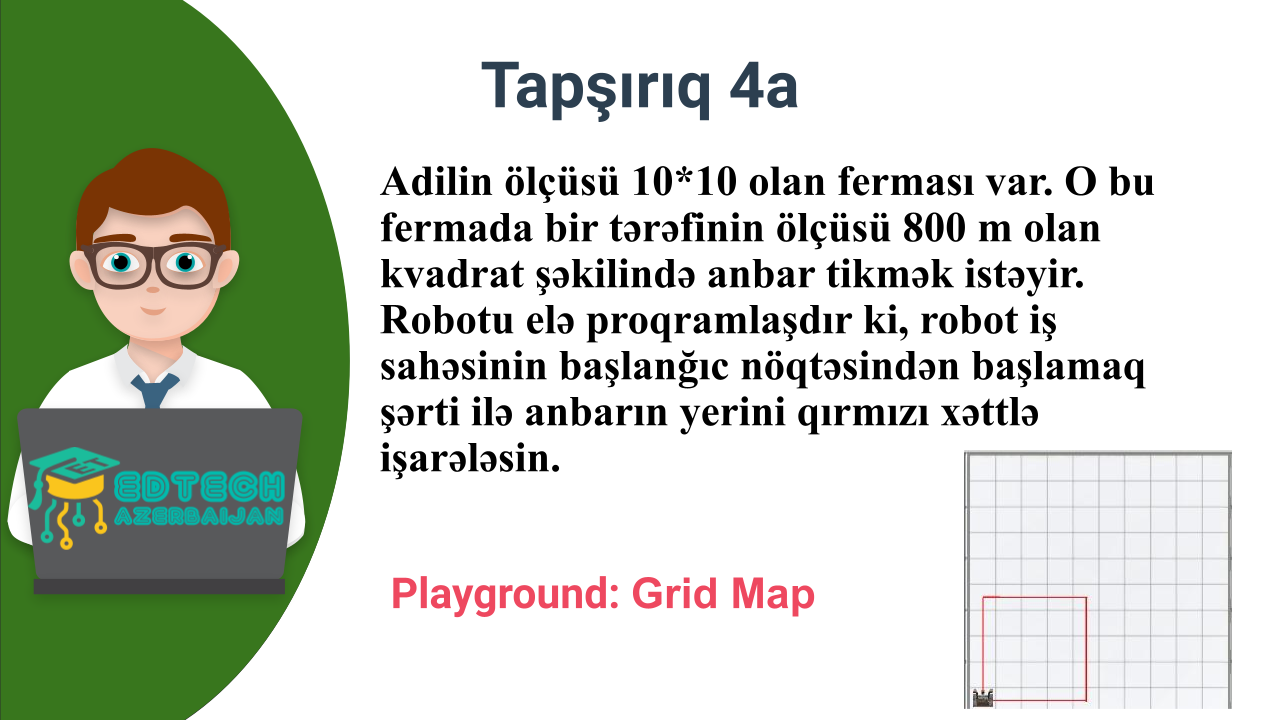
Virtual robotu hərəkət etdirmək üçün Code hissəsindəki Drivetrain blok kateqoriyasına keçid edirik. Bu zaman əmin olun ki playground kimi GridMap sahəsini seçmisiniz. Drivetrain kateqoriyasında Drive Forward blokunu seçib iş sahəsində When stared blokunun altına yerləşdirək. Proqramı işə salsaq robot irəli doğru hərəkət etməyə başlayacaq. Əgər Forward yazılmış hissədə siyahını açıb reverse seçimi etsək bu zaman robot geriyə doğru hərəkət edəcək. Əgər robotun yalnız müəyyən olunmuş məsafə qədər hərəkət etməsini istəyirsinizsə bu zaman Drive Forward for 200 mm blokundan istifadə edin. Robotun sürətini təyin etmək üçün Set drive velocity 50 % blokundan istifadə edirik. Nəzərə alın ki, robotun ən yüksək sürəti 100 % olarq təyin edilib. Grid Map playgroundunda bir xananın ölçüsü 200* 200 olmasından proqramlarınızda istifadə edə bilərsiz. Kateqoriyada olan digər bloklardan istifadə ilə tanış olmaq üçün video dərsə keçid edək:
Bu dərsdə öyrənəcəksiz:
- Hərəkət bloklarndan istifadə - İstiqamət blokundan istifadə
- Dönmə bloklarından istifadə - Sürət blokundan istifadə
Dərs 4| VEX Virtual robotu Rəssam kimi
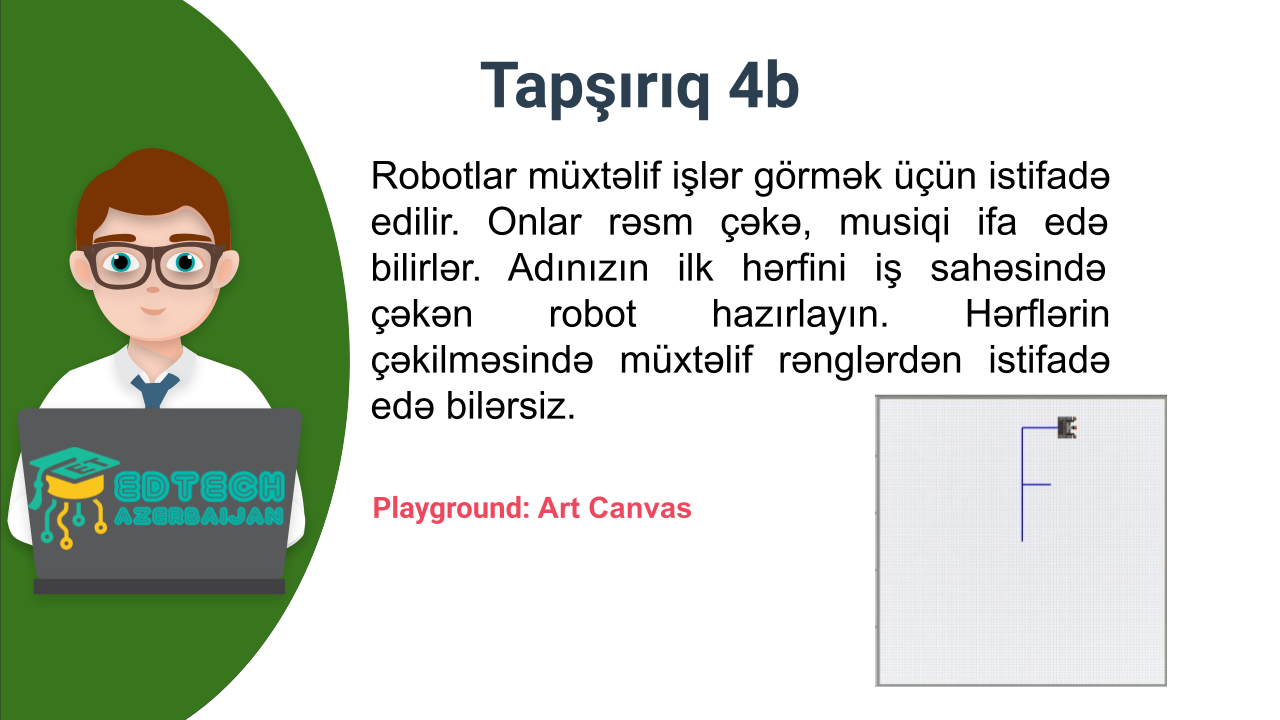
Qələm aləti virtual robotun düz mərkəzində yerləşir. Müxtəlif təsvirlər yaratmaq üçün Art Canvas playgroundundan istifadə edə bilərsiz. İlkin vəziyyətdə qələm yuxarı doğru qaldırılmış formada olur. Looks kateqoriyasından Pen down əmrini sıxmaqla qələmi aşağı endirə, eyni blokdan pen up əmri ilə qələmi ehtiyac olmadıqda yuxarı qaldıra bilərsiz. Set pen color seçimi ilə qələmə müxtəlif rənglər təyin etmək olur. Gəlin qələmin imkanlarını nəzərdən keçirək:
Bu dərsdə öyrənəcəksiz:
- Qələm blokundan necə istifadə etməli
- Repeat blokundan istifadə qaydaları
Dərs 5| VEX Virtual robotu labrintdə
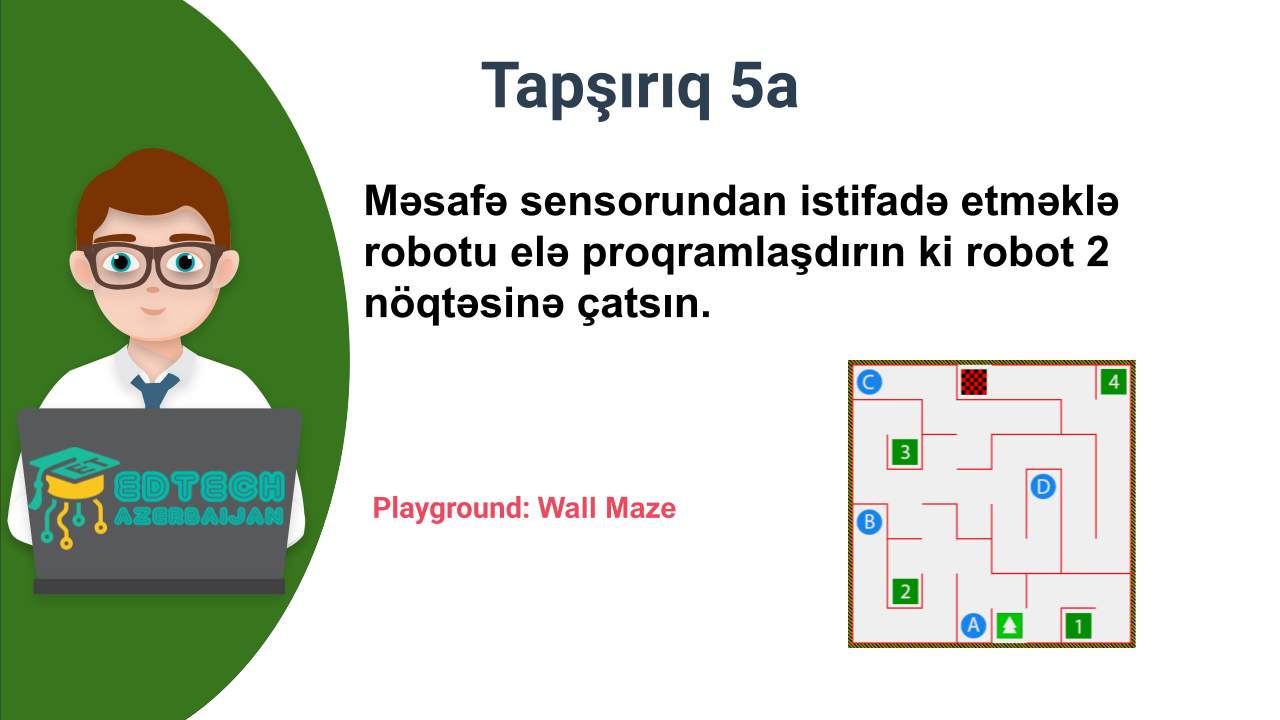
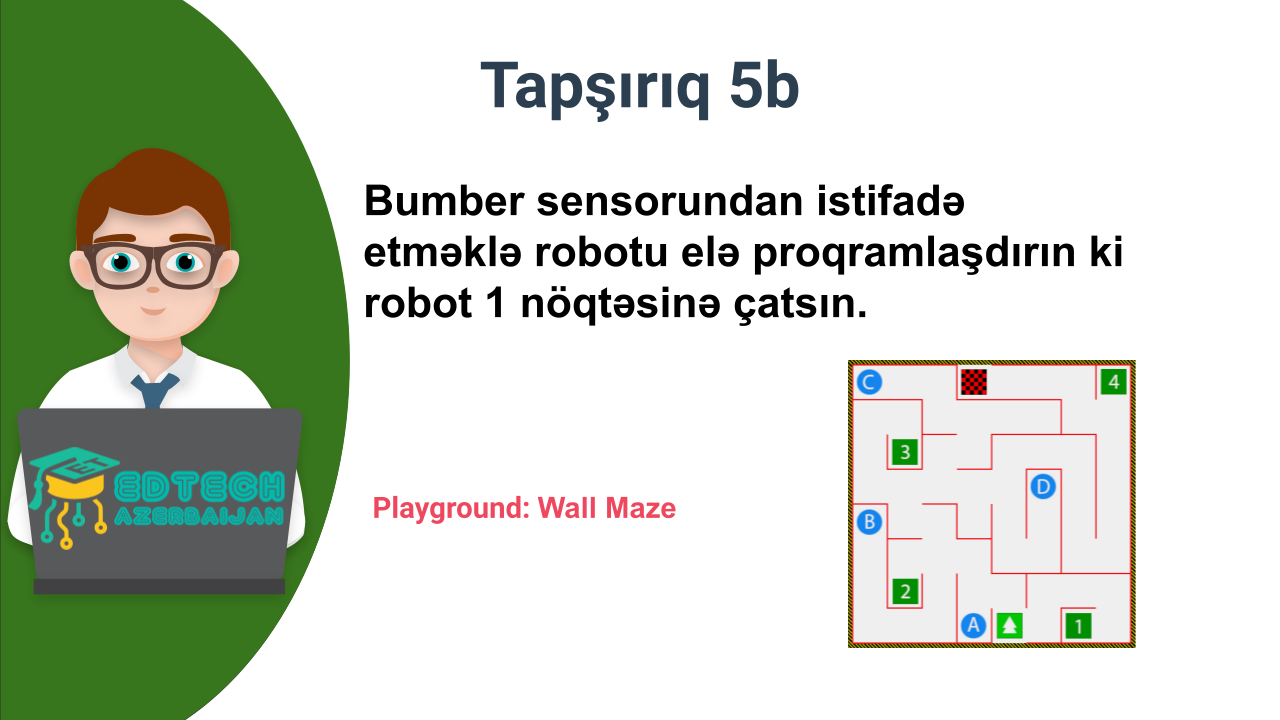
Robotlarla bağlı hazırlanan layihələrdə tez tez labrintdən çıxış yolunu tapan ağıllı robotları görə bilərsiniz. Günümüzdə istifadə olunan bir çox təhsil robotları bu tipli məsələləri bumberdən istifadə etməklə və ya məsafə sensoru vasitəsi ilə həll edirlər. Bu sensorları istifadə etmək üçün Sensorlar bölməsinə keçid edin. Bumber sensor kimi sıxılıb sıxılmamasına görə Doğru ( True) və Yalnış ( False) kimi iki nəticə verir. Bu nəticələri biz şərt və ya da dövrlərin qurulmasında istifadə edirik. Məsafə sensoru isə qarşıdakı obyektə qədər olan məsafəni təyin etmək üçündür. Hər iki sensorun qiymətini proqramı işə saldıqdan sonra Sensorlar monitorunda görə bilərik. Bu sensorlardan istifadəni öyrənmək üçün Wall Maze playgroundundan istifadə edəcəyik.
Bu dərsdə öyrənəcəksiz:
- Bumber sensorundan istifadə qaydaları
- Məsafə sensorundan istifadə
-Proqramlaşdırmada Wait until dövr bloku ilə dövrlərin qurulması
Dərs 6| Robototexnikada maqnitdən istifadə
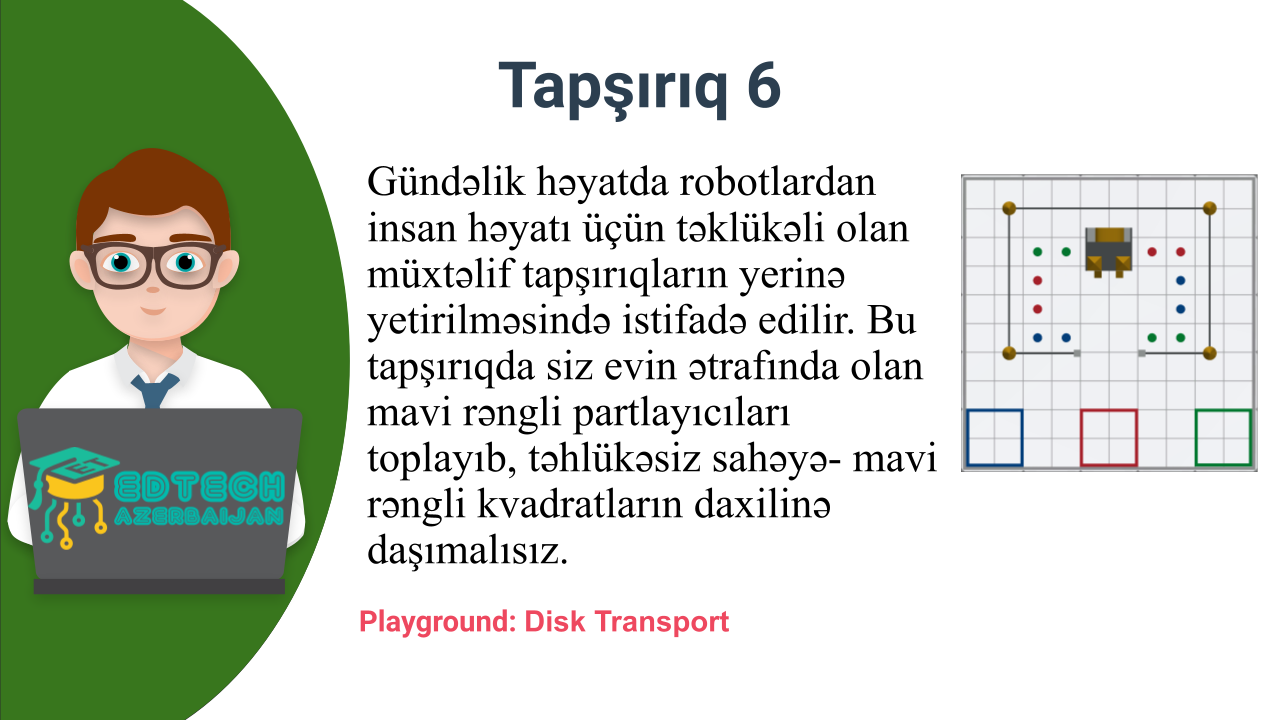
Virtual robotun qabaq tərəfində yerləşən maqnitdən müxtəlif əşyaları hərəkət etdirmək. Eyni zamanda yerlərini dəyişmək üçün istifadə edə bilərsiz. Magnet qrupunda yerləşən energezi magnet to boost komandası ilə maqnit işə salınır. Eyni yerdən maqniti söndürmək üçün də istifadə edilir. Maqnitlə bağlı tapşırıqları yerinə yetirmək üçün Disk Tranport playgroundundan istifadə edə bilərsiz.
Bu dərsdə öyrənəcəksiz:
- Maqnit sensorundan istifadə qaydaları
Dərs 7| Robototexnikada Gyro-Məkan sensorundan istifadə
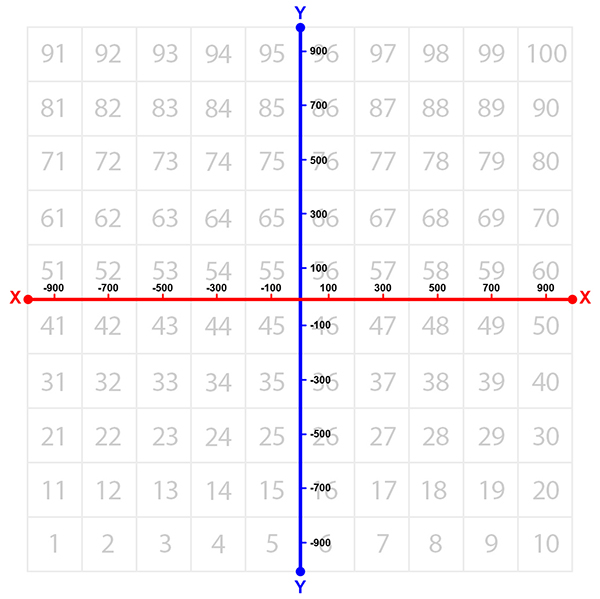
Robot qurğularında tez-tez istifadə olunan sensorlardan biri də məkan -gyro sensordur. Vr VEX robotunda bu sensor robotun arxa tərəfində yerləşir. Bu senosor robotun cari anda olduğu koordinatları müəyyən edir. Bu koordinatların necə dəyişməsini proqramı işə saldıqdan sonra sensorlar cədvəlində görə bilərsiz. Təyin edilmiş koordinatdan istifadə edərək siz robotla müxtəlif misiyaları yerinə yetirə bilirsiz.
Bu dərsdə öyrənəcəksiz:
- Robotun koordinatının müəyyən olunması və koordinatlardan proqramlaşdırmada istifadə
Dərs 8 | Robototexnikada Rəng sensorundan istifadə
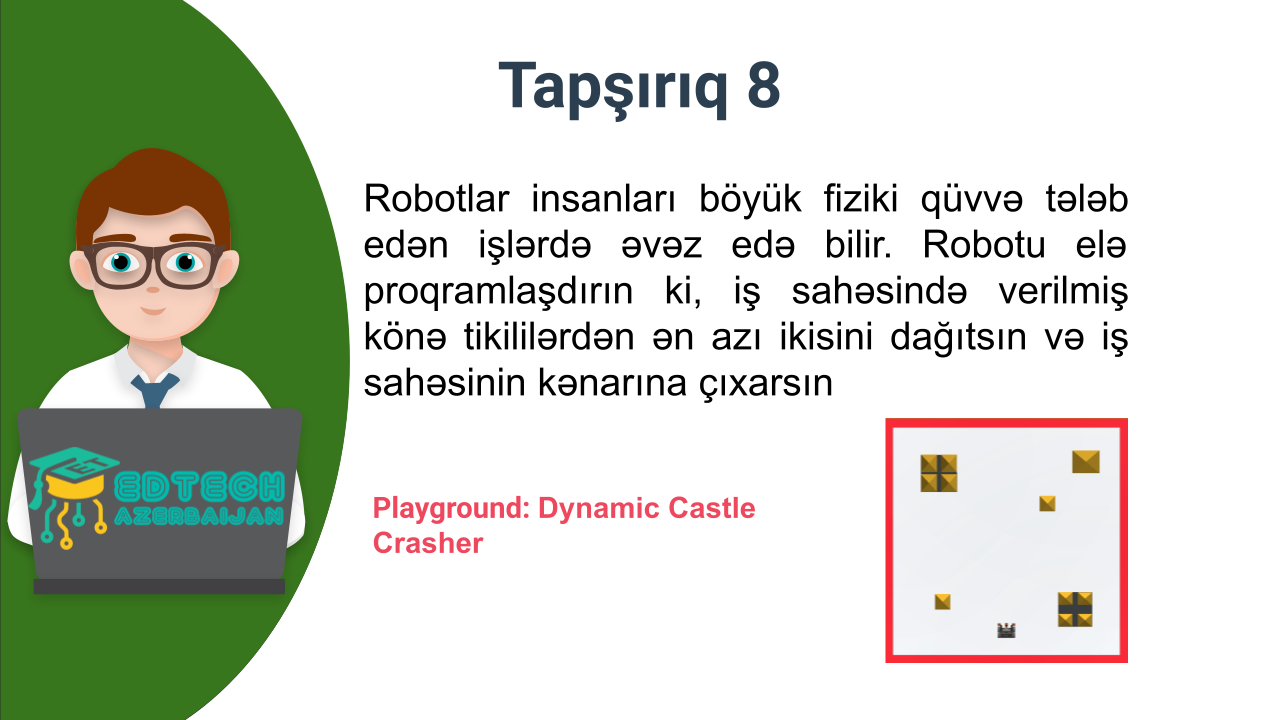
Rəng sensorları robototexnika qurğuların ən vacib hissələrindən biridir. Xətt izləyən, müəyyən sahədə hərəkət edən, obyektdən qaçan və digər növ robotların hazırlanmasında bu sensorlardan tez-tez istifadə edilir. Virtual Vex robotunda iki rəng sensorundan istifadə edilir. Bunlardan birinin üzü aşağı digəri isə üzü qarışya istiqamətləndirilmiş formadadır. Platformadakı rəng sensoru qırmızı, yaşıl, mavi rənglərini və ya obyektin rəngsiz olmasını təyin edə bilir. Robotun bu xüsusiyyətindən müxtəlif misiyaların icra olunmasında istifadə edilir. Bizim baxacağımız misiya Castle Crasher Playground ilə bağlıdır.
Bu dərsdə öyrənəcəksiz:
- Rəng sensorundan istifadə
- If şərtlərindən istifadə
- Forever dövründən istifadə
İmtahan haqqında:
- İmtahan 20 sualdan ibarətdir.
- Sertifikat qazanmaq üçün ən azı 17 suala düzgün cavab vernəlisiz
- İmtahanda vaxt məhdudiyyəti yoxdur.
- Suallar kursda izah edilən mövzuları əhatə edir. Bu səbəbdən videoları diqqətlə izləyin və tapşırıqları yerinə yetirin.
- Sertifikatı əldə etmək üçün adınızı və elektron poçtunuzu dəqiq yazdığınızdan əmin olun
İmtahana daxil olmaq üçün link
Qeyd:
Vex şirkəti tərəfindən təqdim olunan Beynəlxalq Sertifikat imtahanına hazırlıq üçün bizə müraciət edə bilərsiz
Bu və bu kimi digər resurslardan istifadə etməklə proqramlaşdırmanı və robototexnikanı daha dərindən öyrənmək üçün onlayn proqramlaşdırma kurslarımıza müraciət edə bilərsiz.
Sual və fikirlərinizi bildirmək üçün əlaqə vasitələri:
Facebook: @Edtech.az
Whatsapp: 050 716 04 96
Insagram: @edtech.az
Website: www.edtech.az
Email: [email protected]



